Конвертер величин
Содержание:
- Дальность действия РЛС
- Вторичный радиолокатор
- При каком кифозе могут призвать
- Двигатель — агрегат, приводящий автомобиль в движение
- Возможно, вам также будет интересно
- См. также
- Связь с другими отраслями науки
- См. также
- Принимаемая мощность
- Основные методы радиолокации
- Презентация на тему: » Основное уравнение радиолокации. Дальность действия в свободном пространстве Выполнила: Темербекова А.Т. КТиТ-43 Проверила: Жумабаева А.С.» — Транскрипт:
- Дальность действия РЛС
- Дальность действия радиолокатора с активным ответом
- Операторы
- ТТХ
- Эстафета переходит в Германию
- Отличия ЗИЛ-164 от ЗИС-150
- Случайные
- Принимаемая мощность
- Российский внедорожник ГАЗ-3106
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы. В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды. Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
При каком кифозе могут призвать
Наличие кифосколиоза 1 степени не основание для того, чтобы призывника не брать в армию. Служба, сопровождающаяся взвешенными физическими нагрузками, требованиями командиров о военной выправке, контролем поведения, способствует устранению симптомов заболевания и ведет к выздоровлению.
Кифоз 2 степени в отношении возможности призыва для армии не так однозначен. Для решения, брать или не брать, большое значение имеет клиническая картина течения болезни. Заявление кандидата на прохождение воинской службы о постоянных болях, даже не связанных с физическими нагрузками, обязывает медицинскую комиссию принять решение о назначении дополнительных исследований.
Двигатель — агрегат, приводящий автомобиль в движение
Возможно, вам также будет интересно
В преддверии массового перехода на сотовую связь пятого поколения 5G промышленность уже сейчас готова предоставить более современные и совершенные антенные и схемные модули не только для рынка коммерческой электроники, но и для нужд обороны. В качестве примера на рис. 1 показан один их вариантов антенного модуля, который в настоящее время прототипируется такими производителями, как IBM и Ericsson . Этот 5G антенный модуль с рабочей частотой 28 ГГц представляет собой патч-матрицу
Швейцарская компания AnaPico выпустила многоканальную версию APUASYN20-X своего высокочастотного синтезатора APUASYN20. Данное устройство доступно с количеством каналов 1–4 в исполнении для стандартной 19-дюймовой стойки. Новые синтезаторы отличаются высокой стабильностью частоты, низким уровнем фазового шума и малым временем переключения. Для обеспечения высокой фазовой когерентности частные каналы подстраиваются к общему эталонному генератору. Основные характеристики: диапазон рабочих частот:
В статье рассматривается конструкция модуля широкополосного дискретного фазовращателя С‑диапазона с перекрытием по частоте 2:1, обеспечивающего возможность управления фазой сигнала 0–354° с шагом 6° и минимальной паразитной амплитудной модуляцией. Показана структурная схема и конструкция модуля, рассмотрен принцип работы и калибровки фазовых состояний.
См. также
Связь с другими отраслями науки
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности (то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз). Естественно, на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приёмника. Снижение шумов приёмника также было ограничено естественными шумами элементов приёмника, например тепловыми. Данный тупик был преодолён на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и теории информации, и потребовались бы специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала, который позволил отвлечься от конкретных физических процессов в приёмнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.
Одной из первых работ в этой области была работа В. А. Котельникова об оптимальном приёме сигнала, то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии, то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчётливое применение в технике методов статистической теории решений (критерий Неймана-Пирсона) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались сложные сигналы, в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие функции неопределённости сигнала, показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов фильтрации результатов измерений, например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Калмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза, то есть проектирование ведётся в известной мере «на кончике пера».
См. также
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Основные методы радиолокации
РЛС непрерывного излучения
Используются в основном для определения радиальной скорости движущегося объекта (использует эффект Доплера). Достоинством РЛС такого типа является дешевизна и простота использования, однако в таких РЛС сильно затруднено измерение расстояния до объекта.
Пример: простейший радар для определения скорости автомобиля.
Импульсный метод радиолокации
При импульсном методе радиолокации передатчики генерируют колебания в виде кратковременных импульсов, за которыми следуют сравнительно длительные паузы. Причём длительность паузы выбирается исходя из дальности действия РЛС Dmax.
T>2Dmaxc{\displaystyle T>{2D_{max} \over c}}
Сущность метода состоит в следующем:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС.
Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал.
Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
Презентация на тему: » Основное уравнение радиолокации. Дальность действия в свободном пространстве Выполнила: Темербекова А.Т. КТиТ-43 Проверила: Жумабаева А.С.» — Транскрипт:
1
Основное уравнение радиолокации. Дальность дедедействия в свободном пространстве Выполнила: Темербекова А.Т. КТиТ-43 Проверила: Жумабаева А.С.
2
Что такое основное уравнение радиолокации?

3
Основным уравнением радиолокации называется уравнение, связывающее максимальную дальность дедедействия активной РЛС в свободном пространстве с ее основными техническими характеристиками и отражающей способностью объекта.
4
Допустим что.. В точке О расположен передатчик РЛС, излучающий импульсную мощность P I, а в точкеО 1, расположенной на расстоянии D от РЛС, находится отражающий объект(Рис.1). Рис.1. Определение максимальной дальности дедедействия РЛС.

5
Под дальностью дедедействия в свободном пространстве подразумевается дальность, зависящая от технических характеристик РЛС и от отражающих свойств объекта (цели). Влияние атмосферы, формы Земли и подстилающей поверхности в этом случае не учитывается.
6
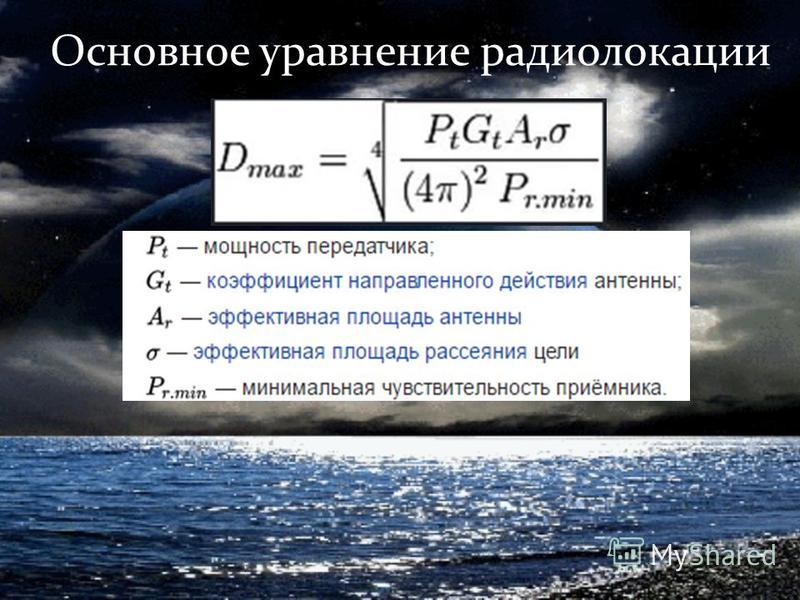
Основное уравнение радиолокации
7
Мощность передатчика Мощность передатчика. Распространено заблуждение, что «мощность и дальность одно и то же». Две радиостанции с одинаковыми мощностями могут отличаться по дальности, например, в десять раз. Гораздо важнее мощности эффективность антенны, чувствительность приёмника и избирательность. Мощность же важна в присутствии электромагнитных помех, тогда увеличение мощности в 4 раза увеличит дальность связи примерно в 1,5 раза. В поле для увеличения дальности в 2 раза мощность надо увеличить в 24=16 раз.
8
Коэффициент напоравоенного де́дедействия антенны Коэффицие́нт напора́военного де́дедействия (КНД) антенны отношение квадрата напряженности поля, создаваемого антенной в данном напоравлении, к среднему значению квадрата напряженности поля по всем напоравлениям.
9
Эффективная площадь антенны Эффективная площадь антенны площадь эквивалентной плоской антенны с равномерным амплитудно- фазовым распределением, обладающей тем же максимальным значением коэффициента напоравоенного дедедействия, что и данная антенна.
10
Эффективная площадь рассеяния ЭПР является количественной мерой свойства объекта рассеивать электромагнитную волну
11
Чувствительность приемника Одним из важнейших показателей качества тракта приема является чувствительность приемника. Она характеризует способность приемника принимать слабые сигналы.
12
Основное уравнение показывает, что Максимальная дальность дедедействия РЛС в свободном пространстве зависит от параметров РЛС и отражающих свойств цели. Максимальная дальность дедедействия РЛС тем выше, чем больше излучаемая мощность передатчика, КНД антенны, ЭПР цели и чем меньше значение чувствительности приемника.
13
Выводы: 1. Увеличение максимальной дальности дедедействия РЛС возможно только за счет увеличения энергии зондирующих импульсов путем увеличения средней мощности передатчика (т.е. за счет увеличения мощности источника питания).
14
2. Увеличение дальности Дмакс в два раза достигается ценой увеличения мощности передатчика Рt или чувствительности приемника (уменьшения Рrмин) в 16 раз
15
3. Для увеличения дальности Дмакс в два раза достаточно увеличить площадь антенны в четыре раза 4. Дальность дедедействия не зависит от формы сигнала.
16
Влияния ВЛИЯНИЕ ВОДНОЙ (ЗЕМНОЙ) ПОВЕРХНОСТИ ВЛИЯНИЕ АТМОСФЕРЫСЖАТИЕ ИМПУЛЬСОВ
17
ВЛИЯНИЕ ВОДНОЙ (ЗЕМНОЙ) ПОВЕРХНОСТИ Водная или земная поверхность влияет на дальность дедедействия судовой навигационной РЛС из-за отражения электромагнитной энергии от подстилающей поверхности, а также вследствие сферичности Земли, ограничивающей дальность радиолокационного обнаружения.
18
ВЛИЯНИЕ АТМОСФЕРЫ Влияние атмосферы выражается в следующем: из-за атмосферной рефракции радиоволны отклоняются от прямолинейного распространения; поглощается и рассеивается энергия радиоволн в сантиметровом и миллиметровом диапазонах. Атмосферная рефракция, т.е. преломление радиоволн в нижних слоях атмосферы
19
СЖАТИЕ ИМПУЛЬСОВ Увеличение длительности зондирующих импульсов снижает разрешающую способность РЛС по дальности, уменьшает потенциальную точность измерения расстояний до объектов.

Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Дальность действия радиолокатора с активным ответом
Активный ответ приходит от радиолокационного ответчика (ретранслятора), установленного на цели.
Максимальная дальность действия по каналу запроса
- Dreq.max=PreqGreqAr4πPr.min{\displaystyle D_{req.max}={\sqrt {{P_{req}G_{req}A_{r}} \over {4\pi P_{r.min}}}}}
Максимальная дальность действия по каналу ответа
- Dresp.max=PrespGrespAr4πPr.min{\displaystyle D_{resp.max}={\sqrt {{P_{resp}G_{resp}A_{r}} \over {4\pi P_{r.min}}}}}
При работе с активным ответом, расстояние входит в формулы со степенью 2, а не 4, так как мощность ответчика является фиксированной и не зависит от мощности падающего на «цель» излучения радара. В случае же пассивного ответа, цель, согласно принципу Гюйгенса-Френеля, представляет собой вторичный переизлучатель, мощность которого прямо пропорциональна падающему на него излучению радара. Таким образом, при пассивной радиолокации сигнал от передатчика радара по пути к цели ослабевает в 4πRt2{\displaystyle 4\pi R_{t}^{2}} раз, отражается, а затем по пути от цели до приемника радара ослабевает еще в 4πRr2{\displaystyle 4\pi R_{r}^{2}}. В результате получаем коэффициент (4π)2Rt2Rr2{\displaystyle {(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}, и в случае, когда Rt = Rr = R, этот коэффициент равен (4π)2R4{\displaystyle {(4\pi )}^{2}R^{4}}.
Операторы
ТТХ
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
Отличия ЗИЛ-164 от ЗИС-150
Новый грузовик создавался на заводе имени Лихачёва в качестве приемника ЗИС-150, который на то время считался достаточно устаревшим. Хотя последние модификации ЗИС-150 практически не отличались от первых ЗИЛ-164, партия требовала не очередной модернизации, а создания абсолютно новой модели, поэтому в 1957 году на базе ЗИС конструкторы создали новый автомобиль.
Его внешность сразу наводила мысли о том, что это модернизированный ЗИС, но некоторые отличия в конструкции моделей всё же имелись:
- Рама автомобиля стала мощнее;
- Двигатель тоже был более мощным;
- Установили карбюратор новой модели;
- Появились телескопические амортизаторы;
- Появилась системе обдува ветровых стёкол;
- Отопитель новой конструкции.
Кроме того, в конструкцию автомобиля было внесено ещё множество различных мелких изменений, которые незаметны с первого взгляда. Например, новый радиатор, более высокие крылья и т.п.
Машина стала выпускаться серийно с 1957 года, и выпускалась до 1964 года. В 1961 году произошла серьёзная модернизация автомобиля, так как на заводе готовились к выпуску совершенно нового грузовика ЗИЛ-130. С 1961 года завод выпускал модель ЗИЛ-164А, который получил часть узлов от новой, более совершенной модели. Последняя модификация получила новое однодисковое сцепление, карданы, тормозной кран. Кроме того, КПП ЗИЛ-164А тоже была взята от модели с индексом 130.
В некоторых источниках указывается, что первые модификации ЗИЛ-164 назывались ЗИС, но это неправда. Завод переименовали в 1956 году, первые автомобили сошли с конвейера только через год после этого, а вот ЗИС-150 действительно назывался ЗИЛ. Последние модели, которые выпускались в 1956 году, имели надпись «ЗИЛ».
Случайные
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.