Эшелонированная оборона: как россия развивает систему загоризонтной радиолокационной разведки
Содержание:
- Содержание
- Примечания[ | ]
- Как работает радиолокатор
- См. также
- История развития радиолокации
- «Не имеет аналогов в мире»
- См. также
- Сообщений 1 страница 1 из 1
- Операторы
- Структура войск ПВО
- Похожие статьи
- Читайте также
- На страже южных рубежей
- Вторичный радиолокатор
- Охота на «стелс» и гиперзвук
- Battlefield V выйдет бесплатно на PlayStation Plus в мае
- Принцип радиотелефонной связи
- Эксплуатационные ограничения и общие эксплуатационные указания
- На стадии перевооружения
- Продукция
- ЗиС-150: история создания – начало
Содержание
Примечания[ | ]
- ↑ 12 Система стратегической ПРО А-135 — система второго поколения ПРО Москвы Архивная копия от 26 ноября 2013 на Wayback Machine // «Воздушно-космическая оборона». — ИД «Алмаз-Медиа», 2005
- ↑ 12345 РЛС СПРН «Дарьял» // «Вестник ПВО»
- ↑ 12 Радиолокационная станция обнаружения и сопровождения баллистических и космических объектов «Дарьял» Архивная копия от 2 октября 2010 на Wayback Machine // Концерн «РТИ Системы»
- ↑ 12345 История создания РЛС дальнего обнаружения баллистических ракет и космических объектов — перспективы сотрудничества // ИА «Оружие России» (5 апреля 2008)
- Радиолокационная станция «Дарьял» // Минобороны России
- РЛС дальнего обнаружения // РТИ имени академика Минца
- Технологии радиолокации / Ред. А. А. Толкачев. — К 50-летию ОАО «Радиофизика». — М.: Вече, 2010. — С. 51. — 479 с. — 1000 экз. — ISBN 978-5-9533-5137-9.
- ↑ 12 80-летний юбилей А. А. Васильева // РТИ имени академика Минца
- ↑ 12 Первов, 2003: Развитие систем РКО до середины 80-х годов. Красноярская РЛС
- ↑ 1234 Всевидящее око России / Независимое военное обозрение // «Независимая газета» (14 апреля 2000)
- ↑ 12 Первов, 2003: Развитие систем РКО до середины 80-х годов. «Дарьял-У» в Гульшаде
- Мурат Уали На диком бреге Балхаша // «Новое поколение» : республиканская газета
- ↑ 12 Балхаш-9, Казахстан, ЗГРЛС «Дарьял-У». Узел ОС-2 Архивная копия от 15 февраля 2012 на Wayback Machine / Надгоризонтные и загоризонтные радиолокационные станции — военные гиганты // Пситеррор.ру
- Пожар на станции Дарьял (видео) / Balkhash9 (17 сентября 2004) // youtube.ru
- Граждан Казахстана завалило обломками СССР // «Коммерсантъ» (28 января 2010)
- На берегу озера Балхаш полностью обрушилось заброшенное здание радиолокационной станции «Дарьял-У» // Сайт телеканала «КТК» (2 июля 2010)
- Yeniseysk (Krasnoyarsk) (англ.)/ Weapons of Mass Destruction (WMD) // GlobalSecurity.org
- Разрушение Красноярской РЛС (видео) / pravda.ru // youtube.ru (21 марта 2011)
- Первов, 2003: Развитие систем РКО до середины 80-х годов. «Дарьял-У» в Иркутске
- Даугава и Дарьял (недоступная ссылка) / Надгоризонтные и загоризонтные радиолокационные станции — военные гиганты // Пситеррор.ру
- В Усольском районе ликвидировали радиолокационную станцию системы предупреждения о ракетном нападении Архивная копия от 10 июля 2011 на Wayback Machine // Вести Иркутск (22 июня 2011)
- По-тихому взорвали РЛС «Дарьял-У» в Мишелёвке
- Новый радар в Иркутской области заступил на дежурство // Lenta.ru (23 мая 2012)
- ↑ 12 Дарьял-УМ, Скрунда-2, Рига Архивная копия от 15 февраля 2012 на Wayback Machine / Надгоризонтные и загоризонтные радиолокационные станции — военные гиганты // Пситеррор.ру
- Красковский, 2008.
- ↑ 12 Печорский радар «Дарьял» пройдёт глубокую модернизацию // Lenta.ru (28 марта 2014)
- На опытно-боевое дежурство заступит очередная РЛС «Воронеж-ДМ» // ИА «Оружие России» (17 июля 2014)
- Габалинская РЛС теперь находится под контролем азербайджанских военных // Независимое военное обозрение (6 октября 2013)
- Оружие: Россия отключила радар в Азербайджане // Lenta.ru (10 декабря 2012)
- Дальнобойный «Воронеж» Архивная копия от 9 августа 2014 на Wayback Machine // Lenta.ru (12 декабря 2011)
- РЛС «Днепр»
- РЛС «Днестр» — «Днепр-М» (неопр.) (фото, автор — SityShooter; слева на фото — РЛС «Даугава»). Panoramio (1 сентября 2011). Архивировано 2 декабря 2012 года.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.
В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
импульсные;непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, также она улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.
Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления за воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
См. также
История развития радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.
Несмотря на то что англичане вступили в «радарную» гонку позже американцев и немцев на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входило двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
https://youtube.com/watch?v=055tx9viDhE
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.
Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
«Не имеет аналогов в мире»
Разработка первого образца семейства «Небо» началась в 1986 году в стенах Горьковского (Нижегородского) научно-исследовательского института радиотехники (ННИИРТ) под руководством прославленного конструктора Александра Зачепицкого.
Также по теме

Эшелонированная оборона: насколько уязвимы американские самолёты и ракеты для российских средств ПВО
Нет никаких гарантий, что новейшие средства воздушного нападения США, на разработку которых тратятся миллионы долларов, смогут…
В 1992 году на полигоне Капустин Яр (Астраханская область) прошли испытания РЛС 55Ж6У.
Серийное производство станций было развёрнуто в 1994 году. Нижегородские учёные практически непрерывно совершенствовали своё детище. В 1995 году они представили Минобороны радиолокационный комплекс «Небо-У». На его базе в 2010 году были запущены опытно-конструкторские работы по проекту «Ниобий».
Главное достоинство «Неба-У» — фазированная антенная решётка с системой цифровой обработки данных. Эта новация позволила повысить точность измерения высоты целей и сократить «зону нечувствительности». Кроме того, высокая степень автоматизации предельно упростила работу оператора.
К преимуществам всего семейства 55Ж6 относят повышенную помехозащищённость, превосходную проходимость транспортных машин, наличие гидравлических систем свёртывания и развёртывания антенных решёток, возможность использования навигационных систем ГЛОНАСС и GPS, а также бескабельное соединение между модулями и аппаратурой.
По информации Минобороны, наземный эшелон СПРН состоит из сети стационарных станций, расположенных по периметру границ России. В настоящее время военное ведомство заменяет комплексы загоризонтного обнаружения второго поколения 5Н79/90Н6 «Дарьял» на радары высокой заводской готовности 77Я6 «Воронеж-М» разработки АО «Радиотехнический институт имени академика А.Л. Минца» (Москва).
«Семейство «Небо» — фактически универсальная станция, которая может как выполнять функции СПРН, так и нести боевую вахту в радиотехнических войсках. Эти станции способны обнаруживать угрозу в ближнем космосе и на небольших высотах», — отметил в беседе с RT директор музея ПВО в Балашихе Юрий Кнутов.

- Расчёт российской РЛС
По словам специалиста, различные модификации «Неба» размещены во всех военных округах России. В начале 2018 года станция «Небо-М» была переброшена в Крым. Кнутов уверен, что уникальные нижегородские РЛС способны успешно выполнять задачи как по периметру российской территории, так и во внутренних районах страны.
«Конечно, «Небо» уступает в мощности станциям типа «Дарьял» и «Воронеж». Однако преимущество этих комплексов в том, что они могут быть оперативно переброшены для усиления противовоздушной обороны какого-либо стратегического направления. Например, сейчас особую актуальность приобрела защита наших арктических и северо-восточных регионов», — подчеркнул Кнутов.
См. также
Сообщений 1 страница 1 из 1
Операторы
Структура войск ПВО
Структура противовоздушной обороны подразделяется на:
- Войсковая ПВО ВС, которая включает части ПВО СВ, ВДВ, береговые ВМФ.
- ПВО Воздушно-космических сил РФ, перекрывающих территорию с важными военными объектами (ПВО-ПРО – войска противоракетной и противовоздушной обороны).
Начиная с 1997 года, действует своя ПВО, образованная в Воздушных силах. В состав этих войск входит ПВО Сухопутных войск, задача которых заключается в обеспечении качественных прикрытий военных объектов и армейских соединений в местах расквартирования от ракетного нападения и воздушного противника, а также при перегруппировках и во время боев.
ПВО Сухопутных войск вооружены различными средствами противодействия врагу, которые способны поражать цели на разных высотах:
- больше 12 км (в стратосфере);
- до 12 км (больших);
- до 4 км (средних);
- до 1 км (малых);
- до 200 метров (предельно малых).
По дальности обстрела противовоздушное вооружение делится на:
- больше 100 км – дальнего действия;
- до 100 км – средней дальности;
- до 30 км – малой дальности;
- до 10 км – ближнего действия.
Постоянное совершенствование войск ПВО состоит в улучшении их мобильности, расширении возможностей обнаружения и сопровождения противника, сокращении времени перевода в боевое состояние, перекрытия секторов поражения для 100% уничтожения атакующих аппаратов.
С 2015 года образованы Военно-космические силы РФ (ВКС), в состав которых входят самостоятельные войска ПВО-ПРО. Главная задача нового воинского образования заключается в противостоянии нападению противника в атмосфере и за ее пределами с целью перехвата атакующих разделяющихся боевых баллистических головок и маневренных крылатых ракет для обеспечения защиты важнейших пунктов в Московской области.
Краткая история войск ПВО РФ
Началом формирования подразделений войсковой ПВО выступил приказ генерала Алексеева – главнокомандующего штаба Верховного Главнокомандующего от 13 декабря 1915 года, которым было объявлено о формировании отдельных четырехорудийных легких батарей для стрельбы по воздушному флоту. Согласно приказу Минобороны РФ от 9 февраля 2007 года – 26 декабря является датой создания войсковой противовоздушной обороны.
В 1941 году система ПВО СССР разделили на ПВО территории страны и Войсковую.
В 1958 году в составе Сухопутных войск был создан отдельный вид войск – войска противовоздушной обороны Сухопутных войск.
В 1997 году сформировались войска войсковой противовоздушной обороны Вооруженных Сил РФ, в результате слияния войск противовоздушной обороны Сухопутных войск, соединений, воинских частей и подразделений ПВО Береговых войск ВМФ, соединений и воских частей ПВО резерва Верховного Главнокомандующего.
26 декабря в Вооруженных Силах России отмечается день войсковой противовоздушной обороны.
Перечислим начальников Войск ПВО Сухопутных войск и ПВО ВС РФ
- начальник войск ПВО Сухопутных войск ВС РФ — генерал-полковник Духов Б. И. – 1991-2000 гг.;
- начальный Войсковой ПВО — генерал-полковник Данилкин В.Б. – 2000-2005 гг.;
- начальник Войсковой ПВО – генерал-полковник Фролов Н. А. – 2008-2010 гг.;
- начальник Войсковой ПВО генерал-майор Круш М. К. – 2008-2010 гг.;
- начальник войск ПВ Сухопутных войск ВС РФ – генерал-майор (с 2013 года генерал-лейтенант) Леонов А. П. – 2010 год и до настоящего времени.
Российская Федерация – единственная страна в мире, которая имеет эшелонированную, полномасштабную, комплексную систему воздушно-космической обороны. Технической основой ВКО выступают системы и комплексы противоракетной и противовоздушной обороны, предназначенные для решения самых разных задач: начиная от тактических и заканчивая оперативно-стратегическими. Технические показатели комплексов и систем ВКО обеспечивают надежное прикрытие войск, важных объектов промышленности, государственного управления, транспорта и энергетики.
По словам специалистов, зенитно-ракетные системы и комплексы – самые сложные военные машины. Помимо радио и лазерного оборудования, они оснащены специальными средствами, которые осуществляют воздушную разведку, слежение и наведение.
Похожие статьи
Читайте также
На страже южных рубежей
Возведение объекта вблизи пгт. Куткашен (после развала СССР — Габала) в закавказской республике началось в 1982 году. Территория работ охватывала более 200 гектаров. Было задействовано около 20 тыс. военных строителей. Датой заступления РЛС «Дарьял» («Габала») на боевое дежурство принято считать февраль 1985 года, хотя полностью строительные работы были завершены только спустя три года. Основное конструктивное отличие габалинского узла — отсутствие вычислительной системы. Полученные данные наблюдения транслировались в центры обработки информации «Швертбот» и «Квадрат», расположенные в Подмосковье.
Станция полностью контролировала южное стратегическое направление, охватывая земли Саудовской Аравии, Ирана, Ирака, Турции, Северной Африки, Пакистана и Индии, большую часть акватории Индийского океана, включая побережье Австралии. РЛС в Габале подтвердила свое техническое совершенство во время ирано-иракского конфликта исправно зафиксировав все боевые пуски иракских ракет «Скад» (139 шт.) и в ходе операции «Буря в пустыне» (302 старта).
После развала Советского Союза заключенные договоренности между правительствами РФ и Азербайджана позволили узлу в южной части Кавказского хребта исправно нести боевую службу вплоть до 2012 года, когда станция была выведена из состава СПРН России.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Охота на «стелс» и гиперзвук
На практике «Резонанс-НЭ» способна обнаруживать широкий класс воздушных целей — самолёты стратегической и оперативно-тактической авиации, вертолёты, крылатые и баллистические ракеты, аэростаты. Однако основной «специализацией» отечественной станции являются самолёты-невидимки, крылатые ракеты и гиперзвуковые изделия.
В РЛС реализован принцип резонансного отражения радиоволн, который приводит к резкому увеличению показателя эффективной отражающей поверхности (ЭОП) воздушных объектов. Таким образом система безошибочно фиксирует летательные аппараты, выполненные по технологии «стелс», и передаёт данные по ним на огневые средства поражения.
- Слайд из презентации ЗАО НИЦ «Резонанс»
По расчётам московских инженеров, ЭОП типичной крылатой ракеты для радаров, использующих эффект Релея, составляет порядка 0,05 кв. м, а для «Резонанса-НЭ» — 15 кв. м.
«Указанное явление делает неэффективной технологию «стелс» и практически снимает вопрос с малозаметностью таких воздушных объектов, как (американские. — RT) самолёты F-117, B-2, F-35 и аналогичных им», — говорится в материалах ЗАО НИЦ «Резонанс».
Ситуация с обнаружением и сопровождением гиперзвуковых объектов более сложная, отметил в беседе с RT генеральный директор предприятия Иван Назаренко. Однако возможности «Резонанс-НЭ» позволяют решать эту задачу за счёт сокращения до одной секунды темпового обращения к цели (темп обновления информации). На других РЛС этот показатель составляет примерно десять секунд.
Также по теме
Скоростной перехват: какое российское оружие сможет уничтожать гиперзвуковые цели
Российская оборонная промышленность обладает необходимыми ресурсами для создания комплекса перехвата гиперзвуковых аппаратов. Такой…
«Естественно, гиперзвуковое изделие быстро летит, и другие радары попросту не успевают за ним. Наше темповое обращение позволяет своевременно отслеживать такие цели. Гиперзвуковой аппарат попадает в энергетическое поле, которое излучает локатор. Оператор станции может видеть такой объект на экране, он подсвечивается красным цветом», — рассказал Назаренко.
Как пояснил руководитель ЗАО НИЦ «Резонанс», подобная РЛС занимает важную нишу в системе противовоздушной обороны России. По оценке Назаренко, на сегодняшний день отечественная станция является самым надёжным средством передачи информации по гиперзвуковым изделиям на комплексы борьбы с ними.
В беседе с RT замглавы ЗАО НИЦ «Резонанс» доктор технических наук Александр Щербинко обратил внимание на когнитивную функцию РЛС. Она заключается в том, что вычислительное оборудование станции анализирует результаты работы по обнаружению воздушных целей, выявляет ошибки и исправляет их
По его словам, в настоящее время в Арктике развёрнуты пять когнитивных радиолокационных станций. Ещё столько же РЛС «Резонанс-НЭ» появится в российском Заполярье в ближайшие годы. При этом системы, которые поставляются зарубежным государствам, лишены искусственного интеллекта.
«Резонанс-НЭ» может эксплуатироваться практически в любых природно-климатических условиях. Радиолокационная система выдерживает температуру от -50 °С до +60 °С, порывы ветра до 50 м/c, плотность выпадения осадков до 300 мм/ч, влажность до 95% при +25 °С.
Как правило, на местности «Резонанс-НЭ» развёрнут в форме квадрата из четырёх модулей. Однако по желанию заказчика РЛС может быть собрана в одномодульном, двухмодульном или трёхмодульном вариантах с секторами обзора 90°, 180° и 270° соответственно.
- Экспортная РЛС «Резонанс-НЭ» в одной из зарубежных стран
Battlefield V выйдет бесплатно на PlayStation Plus в мае
Принцип радиотелефонной связи
Первую передачу информации на расстоянии осуществил русский ученый Александр Степанович Попов (рис. 1).
Рис. 1. Александр Степанович Попов (Источник)
Для этой цели А.С. Попов использовал известную всем азбуку Морзе. Именно ему удалось осуществить радиосвязь, то есть передачу информации при помощи электромагнитных волн. Она заключалась в том, что при помощи точек и тире сообщалась некая информация.
Чем же отличается телефонная радиосвязь от радиосвязи?
Радиотелефонной связью мы называем передачу информации, речи, музыки на большие расстояния при помощи электромагнитных волн. Принцип радиотелефонной связи заключается в следующем: в передающей антенне создается высокочастотный переменный электрический ток, этот ток вокруг передающей антенны создает переменное электромагнитное поле, которое распространяется в виде электромагнитных волн. Такая волна, попадая на приемную антенну, возбуждает в приемной антенне ток той же частоты, что и был произведен при излучении, и таким образом осуществляется радиосвязь, то есть при помощи электромагнитных волн. Для того чтобы обеспечить такую связь, нужны специальные устройства. Во времена А.С. Попова и Генриха Герца, который впервые осуществил излучение электромагнитной волны и ее прием, источники электромагнитных колебаний были очень слабы, и поэтому на большие расстояния электромагнитная волна распространяться не могла. Тем не менее А.С. Попову удалось осуществить связь на расстоянии более 70 километров.
В наше время радиосвязь осуществляется по всему земному шару, даже за его пределами. Вопрос с производством высокочастотных колебаний был решен в 1913 году, когда был создан генератор незатухающих электромагнитных колебаний (рис. 2).
Рис. 2. Генератор незатухающих электромагнитных колебаний (Источник)
Главной частью генератора является трехэлектродная лампа – триод, которая состоит из трех частей: анод, сетка и катод. Вот такая лампа является основной частью любого генератора незатухающих колебаний.
Рассмотрим схему устройства передатчика электромагнитных волн или передающего устройства (рис. 3):
Рис. 3. Передатчик электромагнитных волн (Источник)
В первую очередь это генератор высокой частоты (ГВЧ), соединенный с модулятором (М), на который поступает звук от микрофона. В микрофоне механические колебания, звуковые колебания преобразуются в электрические колебания низкой частоты, и эти колебания от генератора высокой частоты и микрофона соединяются в модуляторе.
После усилителя (У) промодулированный сигнал поступает на передающую антенну, и уже этот сигнал выходит в эфир.
Слово «модуляция» означает «размеренность». Рассмотрим, как осуществляется модуляция в передающей части и из чего она состоит (рис. 4).
Рис. 4. Модуляция в передающей части (Источник)
На первой части рисунка изображены высокочастотные колебания, по вертикали расположено напряжение (U1), которое изменяется синусоидально и за очень маленький промежуток времени проходит очень много колебаний.
Вторая часть рисунка соответствует электрическим сигналам, которые поступают на модулятор от микрофона, это низкочастотные сигналы.
Когда в модуляции происходит объединение этих сигналов, мы наблюдаем высокочастотную составляющую, которая меняется по амплитуде в соответствии сигналам низких частот.
Этот процесс называется амплитудная модуляция.
Сегодня амплитудная модуляция – хорошо изученный и отработанный элемент, поэтому очень часто используется в радиосвязи, то есть когда мы слушаем радио, мы используем амплитудно-модулированный сигнал.
Существуют и другие способы модуляции: частотная модуляция или фазовая модуляция, они тоже нашли свое применение.
Эксплуатационные ограничения и общие эксплуатационные указания
На стадии перевооружения
Все современные РЛС состоят из шести основных компонентов: передатчик (источник электромагнитного сигнала), антенная система (фокусировка сигнала передатчика), радиоприёмник (обработка принятого сигнала), выходные устройства (индикаторы и ЭВМ), аппаратура помехозащиты и источники электропитания.
Также по теме

«Не имеют себе равных»: как Россия создаёт уникальные средства противовоздушной обороны
В России во вторник отмечали День войсковой противовоздушной обороны. Контроль над небом — одна из наиболее актуальных задач для…
Отечественные РЛС могут засекать самолёты, беспилотники и ракеты, отслеживая их передвижение в режиме реального времени. Радары обеспечивают своевременное поступление информации о ситуации в воздушном пространстве вблизи рубежей РФ и за сотни километров от госграниц. На военном языке это называется радиолокационной разведкой.
Стимулом для совершенствования радиолокационной разведки РФ являются усилия иностранных государств (прежде всего США) по созданию малозаметных самолётов, крылатых и баллистических ракет. Так, на протяжении последних 40 лет Соединённые Штаты активно развивают стелс-технологии, которые призваны обеспечить незаметный для РЛС подлёт к рубежам противника.
Огромный военный бюджет (свыше $600 млрд) даёт возможность американским конструкторам экспериментировать с радиопоглощающими материалами и геометрическими формами летательных аппаратов. Параллельно с этим США совершенствуют средства радиолокационной защиты (обеспечение помехозащищённости) и аппараты радиолокационного подавления (создание помех для приёмников РЛС).
Военный эксперт Юрий Кнутов убеждён, что радиолокационная разведка РФ способна обнаруживать практически все виды воздушных целей, включая американские истребители пятого поколения F-22 и F-35, самолёты-невидимки (в частности, стратегический бомбардировщик B-2 Spirit) и объекты, летящие на предельно малых высотах.
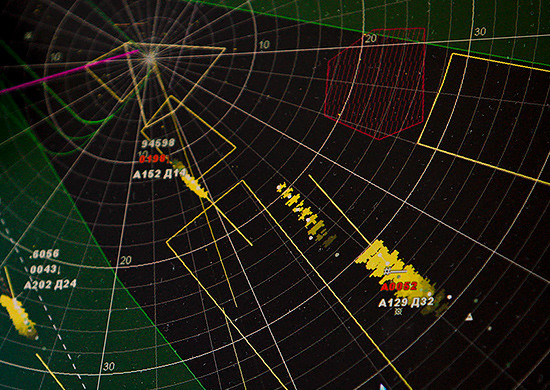
- Экран РЛС, который показывает изображение цели, синхронизированное с движением антенны
Эксперт отметил, что США не прекращают работы по развитию систем радиолокационного подавления, осознавая уязвимое положение перед российскими радарами. Кроме того, на вооружении американской армии стоят специальные противорадиолокационные ракеты, которые наводятся по излучению станций.
«Новейшие российские РЛС отличает невероятный уровень автоматизации по сравнению с предыдущим поколением. Поразительный прогресс был достигнут в улучшении мобильности. В советские годы на то, чтобы развернуть и свернуть станцию, требовались чуть ли не сутки. Сейчас это делается в пределах получаса, а иногда и в течение нескольких минут», — рассказал Кнутов.
Собеседник RT полагает, что радиолокационные комплексы ВКС приспособлены к противодействию высокотехнологичному противнику, снижая вероятность его проникновения в воздушное пространство РФ. По словам Кнутова, сегодня радиотехнические войска России находятся на стадии активного перевооружения, но к 2020 году современными РЛС будет укомплектовано большинство частей.
Продукция
Печатные издания
- Энциклопедия лекарств.
- Книги серии Доктор. Специалист.
- Энциклопедия взаимодействий лекарственных препаратов (главный редактор — д.э.н., проф. Г.Л. Вышковский; главный редактор выпуска д.м.н., проф. Е.Г. Лобанова).
- Пациент (главный редактор — д.м.н., проф. Е.Г. Лобанова).
- Взаимодействие лекарств (главный редактор — д.м.н., проф. Ю.Ф. Крылов).
- Синонимы лекарств.
- Энциклопедия психиатрии (главный редактор — д.м.н., проф. Ю.А. Александровский).
- Энциклопедия клинической онкологии (главный редактор — президент РАМН, директор РОНЦ им. Н.Н. Блохина РАМН, академик РАН и РАМН, проф. М.И. Давыдов).
- Краткий психиатрический словарь (под редакцией д.м.н., проф. Ю.А. Александровского).
- Александровский Ю.А. Словарь терминов, используемых в психиатрии.
- Пограничная психиатрия (под редакцией д.м.н., проф. Ю.А. Александровского).
- Фармацевтический энциклопедический словарь (главный редактор — д.э.н., проф. Г.Л. Вышковский; главный редактор выпуска — д.м.н., проф. Ю.А. Куликов; авторы: д.фарм.н., проф. А. И. Сливкин, к.фарм.н., доц. Т.Г. Афанасьева).
Электронные продукты
- РЛСИСС (Информационно-справочная система).
- РЛС ИСС для интерактивного киоска.
- Электронная Энциклопедия лекарств.
- РЛС ЖНВЛП.
РЛС Энциклопедия лекарств — приложение для мобильных устройств на платформах Android и iOS.
РЛС Справочник лекарств — приложение для мобильных устройств на платформах Android и iOS.
РЛС Сканер — приложение для мобильных устройств на платформах Android и iOS.
ЗиС-150: история создания – начало
История «полтораста» началась еще в 1937 году, когда под руководством Е.И. Важинского появился проект автомобиля ЗиС-15 – нового грузовика, которым планировалось уже тогда заменить устаревающий ЗиС-5.
ЗиС-15 был гораздо мощнее своего предшественника. Грузоподъемность машины составляла 5 тонн, кабина стала трехместной и приобрела более совершенные, для своего времени, обтекаемые формы. Но к 1939 году, уже без Важинского, который был репрессирован в 1938-ом, автомобиль получил ряд доработок. В новом варианте КПП стала пятиступенчатой, на 1 тонну снижена грузоподъемность, а также внесены изменения во внешний облик машины. В таком виде, в 1940 году, грузовик представили на выставке народного хозяйства (позже переименованным в ВДНХ) в Москве, после которой автомобиль начали готовить к массовому производству. Причем ЗиС-15 должен был стать базовой моделью еще для целого ряда машин: трехтонника ЗиС-23, внедорожника ЗиС-24, двух газогенераторных – ЗиС-25 и ЗиС-28, седельного тягача ЗиС-26, а также автобуса с вагонной компоновкой ЗиС-17. Но планам не суждено было осуществиться – пришел 1941 год, а вместе с ним война. Работа над новой машиной остановилась.